अनुप्रयोग प्रयोजनों के लिए पुराने HDD ड्राइव का उपयोग करते समय, कभी-कभी एक समस्या होती है कि स्पिंडल मोटर शुरू होने के कुछ समय बाद बंद हो जाती है। उनके पास एक ऐसी "ट्रिक" है - यदि हेड यूनिट से कंट्रोलर माइक्रोक्रिकिट को कोई सिग्नल नहीं मिलता है, तो यह ड्राइवर माइक्रोक्रिकिट को इंजन को घुमाने से रोकता है। एक उदाहरण के रूप में कई ड्राइव मॉडल का उपयोग करते हुए, आइए यह पता लगाने की कोशिश करें कि इसे कैसे ठीक किया जाए।
यह सब इस तथ्य से शुरू हुआ कि वे कुछ पुरानी हार्ड ड्राइव लाए ( चित्र .1) और कहा कि यहां मजदूरों को "मारे गए" के साथ मिलाया जाता है, यदि आप चाहते हैं - चुनें, यदि आप नहीं चाहते हैं - जो आप चाहते हैं वह करें। लेकिन अगर आप समझते हैं कि उन्हें एक छोटे से एमरी टूल के रूप में कैसे उपयोग किया जाए, तो मुझे बताएं। खैर, मैं यहां बता रहा हूं...
पहला एचडीडी - "क्वांटम" परिवार "फायरबॉल टीएम"ड्राइव चिप TDA5147AK के साथ ( रेखा चित्र नम्बर 2) आइए देखें कि वह क्या है।

शीर्ष कवर कोनों पर 4 स्क्रू और स्टिकर के नीचे शीर्ष पर स्थित एक स्क्रू और नट के साथ तय किया गया है। कवर को हटाने के बाद, आप स्वयं हार्ड ड्राइव, रीडिंग हेड्स और चुंबकीय सिर स्थिति नियंत्रण प्रणाली देख सकते हैं ( अंजीर.3) हम केबल को डिस्कनेक्ट करते हैं, चुंबकीय प्रणाली को हटा देते हैं (यहां आपको विशेष रूप से तेज हेक्स कुंजी "तारांकन" की आवश्यकता होती है)। यदि वांछित है, तो मोटर स्पिंडल पर तीन स्क्रू को हटाकर डिस्क को भी हटाया जा सकता है (आपको एक षट्भुज की भी आवश्यकता है)।

अब हम कवर लगाते हैं ताकि हम इलेक्ट्रॉनिक्स के साथ प्रयोगों के लिए HDD को चालू कर सकें और पावर कनेक्टर में +5V और +12V वोल्टेज लागू कर सकें। मोटर तेज हो जाती है, लगभग 30 सेकंड तक चलती है, और फिर रुक जाती है (सर्किट बोर्ड पर एक हरे रंग की एलईडी होती है - यह मोटर के घूमने पर रोशनी करती है और रुकने पर चमकती है)।
TDA5147K चिप के लिए डेटाशीट नेटवर्क पर आसानी से मिल जाती है, लेकिन इसका उपयोग करके रोटेशन अनुमति / निषेध संकेत का पता लगाना संभव नहीं था। जब पावर बसों के लिए पीओआर संकेतों को "खींचा" जाता है, तो वांछित प्रतिक्रिया प्राप्त करना संभव नहीं था, लेकिन एक आस्टसीलस्कप के साथ संकेतों को देखने पर, यह पता चला कि जब जांच TDA5147AK माइक्रोक्रिकिट के 7 वें आउटपुट को छूती है, तो यह रीसेट हो जाता है और इंजन को पुनरारंभ करता है। इस प्रकार, छोटी दालों के सबसे सरल जनरेटर को इकट्ठा करना ( अंजीर.4, नीचे की तस्वीर) कुछ सेकंड (या दसियों सेकंड) की अवधि के साथ, आप इंजन को लगातार कम या ज्यादा घुमा सकते हैं। बिजली की रुकावट जो लगभग 0.5 सेकंड तक चलती है और यह महत्वपूर्ण नहीं है यदि मोटर का उपयोग छोटे शाफ्ट लोड के साथ किया जाता है, लेकिन अन्य मामलों में यह अस्वीकार्य हो सकता है। इसलिए, हालांकि यह विधि प्रभावी है, यह बिल्कुल सही नहीं है। और इसे "सही ढंग से" लॉन्च करना संभव नहीं था।

अगला एचडीडी - "क्वांटम" परिवार "ट्रेलब्लेज़र" (अंजीर.5).

जब आपूर्ति वोल्टेज लागू किया जाता है, तो ड्राइव जीवन के कोई संकेत नहीं दिखाता है और माइक्रोक्रिकिट 14-107540-03 इलेक्ट्रॉनिक्स बोर्ड पर बहुत गर्म होने लगता है। माइक्रोकिरिट आवास के बीच में, एक उभार ध्यान देने योग्य है ( अंजीर.6), जो इसकी स्पष्ट अक्षमता को इंगित करता है। यह शर्मनाक है, लेकिन डरावना नहीं है।

हम इंजन रोटेशन कंट्रोल चिप को देखते हैं ( अंजीर.7) - HA13555। जब बिजली लगाई जाती है तो यह गर्म नहीं होता है और इस पर कोई दृश्य क्षति नहीं होती है। "स्ट्रैपिंग" तत्वों के परीक्षक द्वारा डायल करने से कुछ खास पता नहीं चला - यह केवल "स्विचिंग" योजना से निपटने के लिए बनी हुई है।

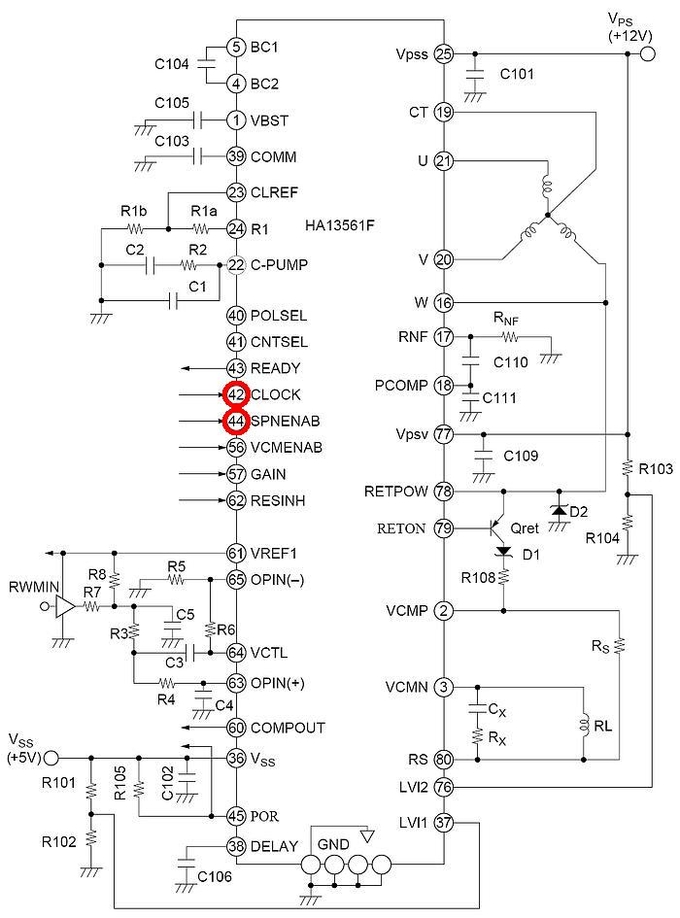
खोज इंजन को इसके लिए कोई डेटाशीट नहीं मिलती है, लेकिन HA13561F के लिए एक विवरण है। यह उसी मामले में बनाया गया है, यह पावर लेग्स पर और HA13555 के साथ "आउटपुट" निष्कर्ष पर मेल खाता है (बाद वाले में मोटर पावर कंडक्टरों को टांका लगाने वाले डायोड हैं - बैक-ईएमएफ के खिलाफ सुरक्षा)। आइए आवश्यक नियंत्रण आउटपुट निर्धारित करने का प्रयास करें। HA13561F पर डेटाशीट से ( अंजीर.8) यह इस प्रकार है कि पिन 42 (क्लॉक) को टीटीएल लॉजिक स्तर के साथ 5 मेगाहर्ट्ज की घड़ी आवृत्ति के साथ संचालित किया जाना चाहिए और यह कि सिग्नल जो इंजन को शुरू करने की अनुमति देता है वह पिन 44 (एसपीएनईएनएबी) पर एक उच्च स्तर है।
चूंकि 14-107540-03 माइक्रोक्रिकिट काम नहीं कर रहा है, इसलिए हमने HA13555 को छोड़कर, इससे और अन्य सभी माइक्रोक्रिकिट्स से +5 V आपूर्ति काट दी ( अंजीर.9) एक परीक्षक के साथ, हम कनेक्शन की अनुपस्थिति से "कटौती" की शुद्धता की जांच करते हैं।
नीचे की तस्वीर पर चित्र 9लाल डॉट्स HA13555 के लिए +5 V वोल्टेज के लिए सोल्डरिंग पॉइंट और इसके 44 पिन के "पुल-अप टू प्लस" रेसिस्टर दिखाते हैं। यदि पिन 45 से रोकनेवाला अपने मूल स्थान से हटा दिया जाता है (यह के अनुसार R105 है) आंकड़ा 8) और इसे माइक्रोक्रिकिट के लिए कुछ झुकाव के साथ लंबवत रखें, फिर पिन 44 के "प्लस" तक खींचने के लिए एक अतिरिक्त रोकनेवाला को पहले रोकनेवाला के माध्यम से और हैंगिंग पिन में मिलाया जा सकता है ( अंजीर.10) और फिर +5 वी बिजली उनके कनेक्शन के स्थान पर आपूर्ति की जा सकती है।

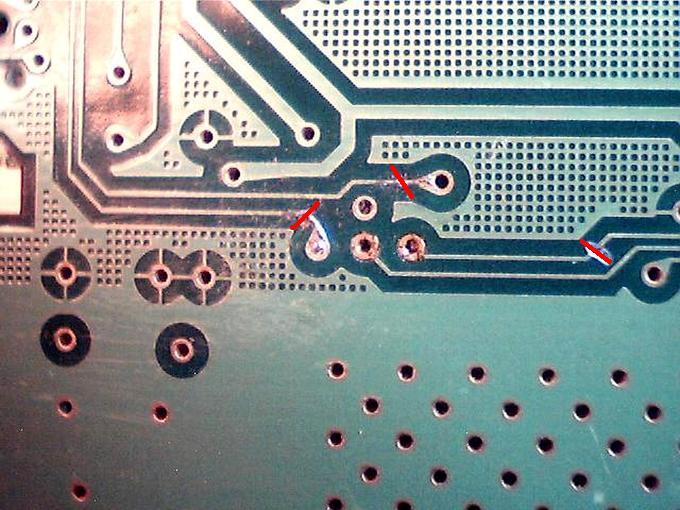
बोर्ड के पीछे की तरफ, पटरियों को काटा जाना चाहिए, जैसा कि दिखाया गया है चित्र 11. ये बर्न-आउट माइक्रोक्रिकिट 14-107540-03 और पुराने "पुल-अप" रेसिस्टर R105 से आने वाले "पूर्व" सिग्नल हैं।
आप किसी भी उपयुक्त माइक्रोक्रिकिट पर इकट्ठे अतिरिक्त बाहरी जनरेटर का उपयोग करके 42 (घड़ी) को पिन करने के लिए "नए" घड़ी संकेतों की आपूर्ति को व्यवस्थित कर सकते हैं। इस मामले में, K555LN1 का उपयोग किया गया था और परिणामी सर्किट में दिखाया गया है चित्र 12.

कनेक्टर से सीधे 36 (Vss) और अन्य आवश्यक कनेक्शनों को पिन करने के लिए MGTF तार के साथ +5 V आपूर्ति वोल्टेज को "रोलिंग" करने के बाद ( अंजीर.13), ड्राइव शुरू होती है और बिना रुके चलती है। स्वाभाविक रूप से, यदि 14-107540-03 माइक्रोक्रिकिट अच्छे क्रम में थे, तो सभी शोधन केवल 44 वें आउटपुट के "संकुचन" में +5 वी बस में शामिल होंगे।

इस "पेंच" पर अन्य घड़ी आवृत्तियों पर इसके प्रदर्शन का परीक्षण किया गया था। सिग्नल को बाहरी स्क्वायर-वेव जनरेटर से आपूर्ति की गई थी और न्यूनतम आवृत्ति जिसके साथ ड्राइव ने स्थिर रूप से काम किया था वह 2.4 मेगाहर्ट्ज थी। कम आवृत्तियों पर, त्वरण और ठहराव चक्रीय रूप से हुआ। अधिकतम आवृत्ति लगभग 7.6 मेगाहर्ट्ज है, इसकी और वृद्धि के साथ, क्रांतियों की संख्या समान रही।
क्रांतियों की संख्या पिन 41 (सीएनटीएसईएल) पर वोल्टेज स्तर पर भी निर्भर करती है। HA13561F चिप के लिए डेटाशीट में एक तालिका है और यह HA13555 से प्राप्त मूल्यों से मेल खाती है। सभी जोड़तोड़ के परिणामस्वरूप, लगभग 1800 आरपीएम की न्यूनतम इंजन गति, अधिकतम 6864 आरपीएम प्राप्त करना संभव था। कार्यक्रम का उपयोग करके नियंत्रण किया गया था, एक एम्पलीफायर के साथ एक ऑप्टोकॉप्लर और डिस्क से चिपके बिजली के टेप का एक टुकड़ा ताकि जब डिस्क घुमाया जाए, तो यह ऑप्टोकॉप्लर विंडो को ओवरलैप कर दे (स्पेक्ट्रम विश्लेषक विंडो में पल्स पुनरावृत्ति दर निर्धारित की गई थी और फिर 60 से गुणा)।
तीसरा ड्राइव - सैमसंग WN310820A.
जब बिजली लगाई जाती है, तो ड्राइवर चिप - HA13561 बहुत गर्म होने लगती है, इंजन घूमता नहीं है। माइक्रोक्रिकिट मामले पर एक उभार ध्यान देने योग्य है ( अंजीर.14), जैसा कि पिछले मामले में है। यह किसी भी प्रयोग का संचालन करने के लिए काम नहीं करेगा, लेकिन आप HA13555 चिप के साथ बोर्ड से इंजन को चलाने की कोशिश कर सकते हैं। लंबे पतले कंडक्टरों को मोटर केबल और इलेक्ट्रॉनिक्स बोर्ड कनेक्टर के आउटपुट संपर्कों में मिलाया गया - सब कुछ शुरू हुआ और बिना किसी समस्या के काम किया। यदि HA13561 बरकरार था, तो रन-अप संशोधन "क्वांटम ट्रेलब्लेज़र" (पिन 44 से +5V रेल) के समान होगा।

चौथा ड्राइव - "क्वांटम" परिवार "फायरबॉल एसई"ड्राइव चिप AN8426FBP के साथ ( अंजीर.15).

यदि आप हेड ब्लॉक केबल को बंद कर देते हैं और एचडीडी को पावर देते हैं, तो इंजन गति पकड़ता है और निश्चित रूप से थोड़ी देर बाद रुक जाता है। नेटवर्क पर AN8426FBP चिप के लिए एक डेटाशीट है और आप इसका उपयोग यह पता लगाने के लिए कर सकते हैं कि कौन सा पिन 44 (SIPWM) शुरू करने के लिए जिम्मेदार है ( अंजीर.16) और अगर अब हम microcircuit 14-108417-02 से आने वाले ट्रैक को काटते हैं और 4.7 kΩ रेसिस्टर के माध्यम से +5 V बस को "पुल अप" पिन 44 करते हैं, तो इंजन बंद नहीं होगा।

और अंत में, थोड़ा पीछे जाने पर, सामान्य तार के सापेक्ष HA13555 चिप के W और V पिन पर तरंगों को लिया गया ( चावल। 17).

पुराने एचडीडी का सबसे सरल अनुप्रयोग ड्रिल, चाकू, स्क्रूड्रिवर ड्रेसिंग के लिए एक छोटा सा एमरी है ( अंजीर.18) ऐसा करने के लिए, बस सैंडपेपर को चुंबकीय डिस्क पर चिपका दें। यदि "पेंच" कई "पेनकेक्स" के साथ था, तो आप विभिन्न अनाज आकारों के विनिमेय डिस्क बना सकते हैं। और यहां स्पिंडल मोटर के रोटेशन की गति को स्विच करने में सक्षम होना अच्छा होगा, क्योंकि बड़ी संख्या में क्रांतियों के साथ सतह को तेज करना बहुत आसान है।

एमरी, निश्चित रूप से, पुराने एचडीडी के लिए एकमात्र उपयोग नहीं है। वैक्यूम क्लीनर डिजाइन और यहां तक कि एक सूती कैंडी बनाने वाला भी नेट पर आसानी से मिल जाता है ...
पाठ के अलावा, प्रोग्राम संस्करण 5 के प्रारूप में बाहरी पल्स जनरेटर के मुद्रित सर्किट बोर्डों के उल्लेखित डेटाशीट और फाइलें हैं (मुद्रण पक्ष से देखें, माइक्रोकिरिट्स को smd के रूप में स्थापित किया जाता है, अर्थात ड्रिलिंग छेद के बिना)।
एंड्री गोल्त्सोव, r9o-11, इस्किटिम, अप्रैल 2018।
रेडियो तत्वों की सूची
| पद | प्रकार | मज़हब | मात्रा | टिप्पणी | अंक | मेरा नोटपैड | |
|---|---|---|---|---|---|---|---|
| ड्राइंग नंबर 4 . के लिए | |||||||
| डीडी 1 | टुकड़ा | K561LN2 | 1 | नोटपैड के लिए | |||
| आर1, आर2 | अवरोध | 470 कोहम | 2 | एसएमडी 0805 | नोटपैड के लिए | ||
| आर4 | अवरोध | 10 कोहम | 1 | एसएमडी 0805 | |||
लंबे समय तक मेरे पास इतना छोटा इंजन था कि मैं किसी तरह की हार्ड ड्राइव से उखड़ गया। वैसे, डिस्क भी उससे संरक्षित थी! अगर मैं इसे एक साथ कर लेता हूं, तो मैं इसे अगले चरण में खराब कर दूंगा। इस बीच, मैंने इसे पुनर्जीवित करने की कोशिश करने का फैसला किया। यह इंजन इसमें दिलचस्प है, सिद्धांत रूप में (जैसा कि मैंने इसे समझा - एक व्यक्ति जो अब तक इंजन के बारे में कुछ नहीं जानता था) यह एक वाल्व है। और जैसा कि विकिपीडिया हमें बताता है: "वाल्व मोटर्स को गठबंधन करने के लिए डिज़ाइन किया गया है सर्वोत्तम गुणएसी मोटर्स और डीसी मोटर्स। "और स्लाइडिंग विद्युत संपर्कों की अनुपस्थिति के कारण (चूंकि ब्रश असेंबली को एक संपर्क रहित सेमीकंडक्टर स्विच के साथ बदल दिया गया था), ऐसे मोटर्स में उच्च विश्वसनीयता और लंबी सेवा जीवन है। इसके अलावा, मैं सभी को सूचीबद्ध नहीं करूंगा इन मोटरों और विषयों के अन्य फायदे विकिपीडिया को फिर से बताने के लिए हैं, लेकिन मैं सिर्फ इतना कहूंगा कि रोबोटिक्स सहित इस तरह के गिज़्मोस का उपयोग काफी व्यापक है, और इसलिए मैं उनके काम के सिद्धांतों के बारे में अधिक जानना चाहता था।
एचडीडी इंजन के संचालन का सिद्धांत।
मोटर में तीन वाइंडिंग एक स्टार फैशन में जुड़ी हुई हैं। वाइंडिंग के सामान्य बिंदु को प्लस के रूप में प्रदर्शित किया जाता है। +5V काम के लिए एकदम सही है। मोटर को पीडब्लूएम सिग्नल द्वारा नियंत्रित किया जाता है, जिसे 120 डिग्री के चरण बदलाव के साथ इसकी वाइंडिंग पर लागू किया जाना चाहिए। हालांकि, इंजन में वांछित आवृत्ति को तुरंत लागू करना संभव नहीं है, इसे पहले तेज किया जाना चाहिए। सबसे आसान तरीकाट्रांजिस्टर के माध्यम से तीन वाइंडिंग कनेक्ट करें, जिससे उन्हें माइक्रोकंट्रोलर से आधार को पीडब्लूएम सिग्नल मिल सके।मैं ट्रांजिस्टर के बारे में तुरंत आरक्षण करूंगा: फील्ड डिवाइस लेना बेहतर है, क्योंकि उनके माध्यम से करंट सभ्य लगता है, और बाइपोलर बहुत गर्म हो जाते हैं। पहले मैंने 2N2222a लिया। वे सेकंड में गर्म हो गए, अस्थायी रूप से पास में एक कूलर स्थापित करके समस्या को हल किया, लेकिन फिर फैसला किया कि कुछ और विश्वसनीय की आवश्यकता है, यानी अधिक नतीजतन, हमने अपना KT817G स्थापित किया। कोई तीसरा नहीं था, इसके बजाय मेरे पास KT815G है। इस सर्किट में, उन्हें बदला जा सकता है, लेकिन KT815 को 1.5 एम्पीयर के निरंतर कलेक्टर करंट और KT817 - 3A के लिए डिज़ाइन किया गया है। मैं ध्यान देता हूं कि 2N2222a सामान्य रूप से - 0.8A तक। KT81 ... अक्षर भी कोई भूमिका नहीं निभाता है, क्योंकि हमारे पास केवल 5 वोल्ट हैं। सिद्धांत रूप में, संकेत परिवर्तन आवृत्ति 1 मिलीसेकंड से अधिक तेज नहीं है, वास्तव में यह और भी धीमी है, इसलिए ट्रांजिस्टर की उच्च आवृत्ति भी एक भूमिका नहीं निभाती है। सामान्य तौर पर, मुझे संदेह है कि इस सर्किट में आप लगभग किसी भी ट्रांजिस्टर के साथ प्रयोग कर सकते हैं एन-पी-एन प्रकार, कम से कम 1 एम्पीयर के कलेक्टर करंट के साथ।
मैं सर्किट को संलग्न कर रहा हूं, प्रतिरोधकों को भी प्रयोगात्मक रूप से चुना गया था, 1 किलो-ओम के लिए - वे काफी अच्छी तरह से काम करते हैं। मैंने एक और 4.7k लगाया - यह बहुत है, इंजन रुक रहा है।
मोटर में 4 आउटपुट हैं। सबसे पहले, हम यह पता लगाते हैं कि उनमें से कौन सा सामान्य है। ऐसा करने के लिए, एक मल्टीमीटर के साथ सभी टर्मिनलों के बीच प्रतिरोध को मापें। वाइंडिंग के सिरों के बीच प्रतिरोध एक वाइंडिंग के अंत और सामान्य मध्य बिंदु के बीच का प्रतिरोध है। परंपरागत रूप से, 2 के खिलाफ 4 ओम। किस वाइंडिंग को कहां से कनेक्ट करना है - इससे कोई फर्क नहीं पड़ता, वे अभी भी एक के बाद एक जाते हैं।
कार्यक्रम पाठ:
// हार्ड ड्राइव इंजन शुरू करने का कार्यक्रमव्यर्थ व्यवस्था()
#define P 9100 // मोटर त्वरण के लिए प्रारंभिक देरी
#define x 9 // पिन नंबर को वाइंडिंग x . पर पिन करें
#define y 10 // पिन नंबर को वाइंडिंग y . पर पिन करें
#define z 11 // पिन नंबर को वाइंडिंग z . पर पिन करें
अहस्ताक्षरित इंट पी; // ओवरक्लॉकिंग के लिए विलंब चर
लंबा समय_पास; // टाइमर
बाइट मैं = 0; // मोटर चरण नियंत्रण चक्र का काउंटर
{
p = P;// ओवरक्लॉकिंग के लिए प्रारंभिक विलंब मान असाइन करें// सीरियल.बेगिन (9600); // डिबगिंग के लिए COM पोर्ट खोलें
पिनमोड (एक्स, आउटपुट); // आउटपुट डेटा के लिए इंजन के साथ काम करने वाले पिन सेट करें
पिनमोड (वाई, आउटपुट);
पिनमोड (जेड, आउटपुट);
डिजिटलवाइट (एक्स, लो); // मोटर के शुरुआती चरण को सेट करें, आप 6 चरणों में से किसी से भी शुरू कर सकते हैं
डिजिटलवाइट (वाई, हाई);
डिजिटलवाइट (जेड, लो);
टाइम_पास = माइक्रो (); // टाइमर रीसेट करेंशून्य लूप ()
{अगर मैं< 7) && (micros () - time_pass >= पी)) // यदि काउंटर में 0 से 6 तक की संख्या है, और चरण परिवर्तन का समय समाप्त हो गया है
{
टाइम_पास = माइक्रो (); // टाइमर रीसेट करें
अगर (i == 0) ( digitalWrite (z, High ); ) // वांछित पिन पर चरण संख्या के आधार पर 0 या 1 सेट करें
अगर (i == 2) ( digitalWrite (y, LOW ); )
अगर (i == 3) ( digitalWrite (x, High ); )
अगर (i == 4) ( digitalWrite (z, LOW ); )
अगर (i == 5) ( digitalWrite (y, High ); )
अगर (i == 6) ( digitalWrite (x, LOW ); )मैं++; // प्लस चरण काउंटर
}
अगर (i>= 7) // अगर काउंटर ओवरफ्लो हो जाता है
{
मैं = 0; // काउंटर को रीसेट करें
अगर (पी> 1350) (पी = पी - 50;) // यदि इंजन अभी तक अपनी अधिकतम गति तक नहीं पहुंचा है, तो हम चरण परिवर्तन समय को कम करते हैं
// सीरियल.प्रिंट्लन (पी); टाइमआउट डिबग
}
इसका परिणाम क्या है?
नतीजतन, हमारे पास एक इंजन है जो कुछ सेकंड में तेज हो जाता है। कभी-कभी त्वरण असंतुलित होता है और इंजन बंद हो जाता है, लेकिन अधिक बार सब कुछ काम करता है। कैसे स्थिर करें - मैं अभी नहीं जानता। यदि आप इंजन को हाथ से रोकते हैं, तो यह फिर से शुरू नहीं होगा - आपको प्रोग्राम को पुनरारंभ करने की आवश्यकता है। अब तक, यह अधिकतम है जिसे इसमें से निचोड़ा गया है। जब p 1350 से नीचे चला जाता है, तो इंजन त्वरण से बाहर निकल जाता है। शुरुआत में 9100 को भी प्रयोगात्मक रूप से चुना गया था, आप इसे बदलने की कोशिश कर सकते हैं, देखें कि क्या होता है। शायद, एक अलग इंजन के लिए, संख्याएं अलग होंगी - मुझे अपने लिए चयन करना था। लोड के साथ ( मूल डिस्क) इंजन शुरू होना बंद हो जाता है, इसलिए उस पर कुछ स्थापित करने के लिए फ़र्मवेयर को पुन: कैलिब्रेट करने की आवश्यकता होगी। यह अपेक्षाकृत तेजी से घूमता है, इसलिए मैं शुरू करते समय चश्मा लगाने की सलाह देता हूं, खासकर अगर उस समय कुछ लटका हुआ हो। मैं इसके साथ प्रयोग जारी रखने की उम्मीद करता हूं। तब तक, सभी को शुभकामनाएँ!
हार्ड ड्राइव आमतौर पर तीन-चरण ब्रशलेस मोटर्स का उपयोग करते हैं। मोटर वाइंडिंग एक तारे से जुड़े होते हैं, यानी हमें 3 आउटपुट (3 चरण) मिलते हैं। कुछ मोटर्स में 4 आउटपुट होते हैं, वे अतिरिक्त रूप से सभी वाइंडिंग के मध्य कनेक्शन बिंदु को प्रदर्शित करते हैं।
ब्रश रहित मोटर को स्पिन करने के लिए, आपको रोटर की स्थिति के आधार पर, वाइंडिंग में वोल्टेज को सही क्रम में और निश्चित समय पर लागू करने की आवश्यकता होती है। स्विचिंग के क्षण को निर्धारित करने के लिए, इंजन पर हॉल सेंसर स्थापित किए जाते हैं, जो एक भूमिका निभाते हैं प्रतिक्रिया.
स्विचिंग के क्षण को निर्धारित करने के लिए हार्ड ड्राइव एक अलग तरीके का उपयोग करते हैं, प्रत्येक क्षण दो वाइंडिंग बिजली की आपूर्ति से जुड़े होते हैं, और वोल्टेज को तीसरे पर मापा जाता है, जिसके आधार पर स्विच किया जाता है। 4-वायर संस्करण में, इसके लिए फ्री वाइंडिंग के दोनों आउटपुट उपलब्ध हैं, और 3 आउटपुट वाली मोटर के मामले में, स्टार-कनेक्टेड रेसिस्टर्स का उपयोग करके एक वर्चुअल मिडपॉइंट अतिरिक्त रूप से बनाया जाता है और मोटर वाइंडिंग के समानांतर जुड़ा होता है। चूंकि वाइंडिंग की स्विचिंग रोटर की स्थिति के अनुसार की जाती है, रोटर की गति और मोटर वाइंडिंग द्वारा बनाए गए चुंबकीय क्षेत्र के बीच समकालिकता होती है। सिंक्रोनाइज़ेशन विफलता के कारण रोटर रुक सकता है। 
TDA5140, TDA5141, 42.43 और अन्य जैसे ब्रशलेस तीन-चरण मोटर्स को नियंत्रित करने के लिए डिज़ाइन किए गए विशेष माइक्रोक्रिकिट हैं, लेकिन मैं यहां उन पर विचार नहीं करूंगा।
सामान्य स्थिति में, स्विचिंग आरेख आयताकार दालों के साथ 3 सिग्नल होते हैं, जो एक दूसरे से चरण में 120 डिग्री से स्थानांतरित होते हैं। सबसे सरल संस्करण में, आप बिना किसी प्रतिक्रिया के इंजन शुरू कर सकते हैं, बस इसमें 3 आयताकार सिग्नल (मींडर) लगाकर, 120 डिग्री से ऑफसेट, जो मैंने किया। मेन्डर की एक अवधि के लिए, वाइंडिंग द्वारा निर्मित चुंबकीय क्षेत्र मोटर की धुरी के चारों ओर एक पूर्ण क्रांति करता है। इस मामले में रोटर के घूमने की गति उस पर चुंबकीय ध्रुवों की संख्या पर निर्भर करती है। यदि ध्रुवों की संख्या दो (ध्रुवों की एक जोड़ी) है, तो रोटर चुंबकीय क्षेत्र के समान आवृत्ति पर घूमेगा। मेरे मामले में, मोटर रोटर में 8 ध्रुव (ध्रुवों के 4 जोड़े) होते हैं, यानी रोटर चुंबकीय क्षेत्र की तुलना में 4 गुना धीमी गति से घूमता है। अधिकांश 7200 आरपीएम हार्ड ड्राइव में 8 पोल रोटर होना चाहिए, लेकिन यह सिर्फ मेरा अनुमान है क्योंकि मैंने हार्ड ड्राइव के एक समूह का परीक्षण नहीं किया है। 
यदि रोटर के रोटेशन की वांछित गति के अनुसार, आवश्यक आवृत्ति पर इंजन पर दालों को लागू किया जाता है, तो यह स्पिन नहीं करेगा। यहां, एक त्वरण प्रक्रिया आवश्यक है, अर्थात, हम पहले कम आवृत्ति पर दालों को लागू करते हैं, फिर धीरे-धीरे इसे आवश्यक आवृत्ति तक बढ़ाते हैं। इसके अलावा, त्वरण प्रक्रिया शाफ्ट पर भार पर निर्भर करती है।
इंजन शुरू करने के लिए, मैंने PIC16F628A माइक्रोकंट्रोलर का इस्तेमाल किया। बिजली खंड में द्विध्रुवी ट्रांजिस्टर पर तीन चरण का पुल होता है, हालांकि गर्मी अपव्यय को कम करने के लिए क्षेत्र-प्रभाव ट्रांजिस्टर का उपयोग करना बेहतर होता है। इंटरप्ट हैंडलर सबरूटीन में आयताकार दालें उत्पन्न होती हैं। 3 चरण-स्थानांतरित सिग्नल प्राप्त करने के लिए, एक मेन्डियर अवधि प्राप्त करते हुए, 6 इंटरप्ट किए जाते हैं। माइक्रोकंट्रोलर प्रोग्राम में, मैंने सिग्नल फ्रीक्वेंसी में एक पूर्व निर्धारित मूल्य में एक सहज वृद्धि को लागू किया। विभिन्न प्रीसेट सिग्नल आवृत्ति के साथ केवल 8 मोड: 40, 80, 120, 160, 200, 240, 280, 320 हर्ट्ज। रोटर पर 8 ध्रुवों के साथ, हमें निम्नलिखित रोटेशन गति मिलती है: 10, 20, 30, 40, 50, 60, 70, 80 आरपीएम। 
त्वरण 0.5 सेकंड के लिए 3 हर्ट्ज से शुरू होता है, यह रोटर के प्रारंभिक स्पिन-अप के लिए संबंधित दिशा में आवश्यक प्रयोगात्मक समय है, क्योंकि ऐसा होता है कि रोटर एक छोटे कोण के माध्यम से घूमता है दूसरी तरफ, उसके बाद ही संबंधित दिशा में घूमना शुरू करता है। इस मामले में, जड़ता का क्षण खो जाता है, और यदि आप तुरंत आवृत्ति बढ़ाना शुरू करते हैं, तो डीसिंक्रनाइज़ेशन होता है, रोटर अपने रोटेशन में बस चुंबकीय क्षेत्र के साथ नहीं रहेगा। रोटेशन की दिशा बदलने के लिए, आपको मोटर के किसी भी 2 चरणों को स्वैप करना होगा।
0.5 सेकंड के बाद, संकेत आवृत्ति धीरे-धीरे निर्दिष्ट मान तक बढ़ जाती है। गैर-रैखिक नियम के अनुसार आवृत्ति बढ़ती है, त्वरण के दौरान आवृत्ति वृद्धि दर बढ़ जाती है। दी गई गति के लिए रोटर त्वरण समय: 3.8; 7.8; 11.9; सोलह; 20.2; 26.3; 37.5; 48.2 सेकंड। सामान्य तौर पर, प्रतिक्रिया के बिना, इंजन कठिन गति करता है, आवश्यक त्वरण समय शाफ्ट पर भार पर निर्भर करता है, मैंने चुंबकीय डिस्क ("पैनकेक") को हटाए बिना सभी प्रयोग किए, स्वाभाविक रूप से, इसके बिना त्वरण को तेज किया जा सकता है।
मोड स्विचिंग SB1 बटन द्वारा किया जाता है, जबकि मोड HL1-HL3 LED पर इंगित किए जाते हैं, सूचना बाइनरी कोड में प्रदर्शित होती है, HL3 शून्य बिट है, HL2 पहला बिट है, HL1 तीसरा बिट है। जब सभी एल ई डी बंद हो जाते हैं, तो हमें नंबर शून्य मिलता है, यह पहले मोड (40 हर्ट्ज, 10 आरपीएम) से मेल खाता है, यदि उदाहरण के लिए एचएल 1 एलईडी चालू है, तो हमें नंबर 4 मिलता है, जो पांचवें मोड (200) से मेल खाता है। हर्ट्ज, 50 आरपीएम)। स्विच SA1 इंजन को शुरू या बंद करता है, संपर्कों की बंद स्थिति "प्रारंभ" कमांड से मेल खाती है।
चयनित गति मोड को माइक्रोकंट्रोलर के EEPROM को लिखा जा सकता है, इसके लिए आपको SB1 बटन को 1 सेकंड के लिए दबाए रखना होगा, जबकि सभी LED फ्लैश करेंगे, जिससे रिकॉर्डिंग की पुष्टि होगी। डिफ़ॉल्ट रूप से, यदि EEPROM में कोई प्रविष्टि नहीं है, तो माइक्रोकंट्रोलर पहले मोड में चला जाता है। इस प्रकार, मोड को मेमोरी में लिखकर और SA1 स्विच को "स्टार्ट" स्थिति में सेट करके, आप केवल डिवाइस को बिजली की आपूर्ति करके इंजन शुरू कर सकते हैं।
इंजन का टॉर्क छोटा होता है, जिसकी हार्ड ड्राइव में काम करते समय जरूरत नहीं होती है। जब शाफ्ट पर भार बढ़ता है, तो डीसिंक्रनाइज़ेशन होता है और रोटर बंद हो जाता है। सिद्धांत रूप में, यदि आवश्यक हो, तो आप एक गति संवेदक संलग्न कर सकते हैं, और संकेत की अनुपस्थिति में, बिजली बंद कर सकते हैं और इंजन को फिर से घुमा सकते हैं।
3-चरण पुल में 3 ट्रांजिस्टर जोड़कर, आप माइक्रोकंट्रोलर नियंत्रण रेखाओं की संख्या को घटाकर 3 कर सकते हैं, जैसा कि नीचे दिए गए चित्र में दिखाया गया है। 
बहुत समय पहले मैं LB11880 चिप पर एक स्टेपर मोटर ड्राइवर सर्किट में आया था, लेकिन चूंकि मेरे पास ऐसी कोई चिप नहीं थी, और आसपास कई मोटरें पड़ी थीं, इसलिए मैंने बैक बर्नर पर मोटर शुरू करने के साथ एक दिलचस्प परियोजना को बंद कर दिया। . समय बीत गया, और अब विवरण के साथ चीन के विकास में कोई समस्या नहीं है, इसलिए मैंने एक एमएस का आदेश दिया, और एचडीडी से हाई-स्पीड मोटर्स के कनेक्शन को इकट्ठा करने और परीक्षण करने का निर्णय लिया। चालक योजना को मानक के रूप में लिया जाता है:
मोटर चालक सर्किट
लेख का संक्षिप्त विवरण निम्नलिखित है, पूरा पढ़ें। हार्ड ड्राइव (या सीडी/डीवीडी-रोम) स्पिंडल को घुमाने वाली मोटर एक पारंपरिक तीन-चरण सिंक्रोनस डीसी मोटर है। उद्योग रेडी-मेड सिंगल-चिप कंट्रोल ड्राइवर का उत्पादन करता है, जिसके अलावा, रोटर स्थिति सेंसर की आवश्यकता नहीं होती है, क्योंकि मोटर वाइंडिंग ऐसे सेंसर के रूप में कार्य करते हैं। तीन-चरण डीसी मोटर्स के लिए नियंत्रण आईसी जिन्हें अतिरिक्त सेंसर की आवश्यकता नहीं होती है, वे हैं TDA5140; टीडीए5141; टीडीए5142; टीडीए5144; TDA5145 और निश्चित रूप से एलबी11880.

संकेतित योजनाओं के अनुसार जुड़ा इंजन तब तक तेज हो जाएगा जब तक कि माइक्रोकिरिट की वीसीओ पीढ़ी की आवृत्ति सीमा तक नहीं पहुंच जाती है, जो कि पिन 27 से जुड़े संधारित्र के मूल्यों से निर्धारित होती है (इसकी क्षमता जितनी छोटी होगी, आवृत्ति उतनी ही अधिक होगी) ), या इंजन यंत्रवत् नष्ट हो गया है। टर्मिनल 27 से जुड़े कैपेसिटर की कैपेसिटेंस को बहुत ज्यादा कम न करें, क्योंकि इससे इंजन को स्टार्ट करना मुश्किल हो सकता है। माइक्रोक्रिकिट के पिन 2 पर वोल्टेज को क्रमशः बदलकर रोटेशन की गति को समायोजित किया जाता है: Vpit - अधिकतम गति; 0 - इंजन बंद हो गया है। लेखक की ओर से एक हस्ताक्षर भी है, लेकिन मैंने अपने संस्करण को अधिक कॉम्पैक्ट के रूप में फैलाया है।

बाद में, मेरे द्वारा ऑर्डर किए गए LB11880 microcircuits आए, उन्हें दो तैयार स्कार्फ में मिलाया और उनमें से एक का परीक्षण किया। सब कुछ ठीक काम करता है: गति एक चर द्वारा नियंत्रित होती है, गति निर्धारित करना मुश्किल होता है, लेकिन मुझे लगता है कि निश्चित रूप से 10,000 तक हैं, क्योंकि इंजन शालीनता से गुलजार है।

सामान्य तौर पर, एक शुरुआत की गई है, मैं सोचूंगा कि कहां आवेदन करना है। इसे लेखक के ग्राइंडिंग व्हील के समान बनाने का विचार है। और अब मैंने इसे प्लास्टिक के एक टुकड़े पर परीक्षण किया, इसे पंखे की तरह बनाया, यह बस बेरहमी से उड़ा, भले ही फोटो यह भी नहीं दिखाता कि यह कैसे घूमता है।

आप कैपेसिटर C10 की कैपेसिटेंस को स्विच करके और MS को 18 V (18.5 V लिमिट) तक पावर सप्लाई करके स्पीड को 20,000 से ऊपर बढ़ा सकते हैं। इस वोल्टेज पर, मेरी मोटर ने अच्छी तरह सीटी बजाई! यहां 12 वोल्ट बिजली की आपूर्ति वाला एक वीडियो है:
एचडीडी मोटर कनेक्शन वीडियो
मैंने सीडी से इंजन को भी जोड़ा, इसे 18 वी की बिजली आपूर्ति के साथ चलाया, क्योंकि मेरे अंदर गेंदें हैं, यह तेज हो जाता है ताकि सब कुछ इधर-उधर हो जाए! गति को ट्रैक न करना अफ़सोस की बात है, लेकिन ध्वनि को देखते हुए, यह बहुत बड़ी है, एक पतली सीटी तक। ऐसी गति कहां लागू करें, यही सवाल है? एक मिनी ग्राइंडर, एक टेबल ड्रिल, एक ग्राइंडर दिमाग में आता है ... कई अनुप्रयोग हैं - अपने लिए सोचें। अपने इंप्रेशन एकत्र करें, परीक्षण करें, साझा करें। दिलचस्प में इन इंजनों का उपयोग करते हुए इंटरनेट पर कई समीक्षाएं हैं अस्थायी डिजाइन. मैंने इंटरनेट पर एक वीडियो देखा, वहाँ इन मोटरों के साथ कुलिबिन पंप, सुपर पंखे, शार्पनर बनाते हैं, आप यह पता लगा सकते हैं कि ऐसी गति कहाँ लागू करें, यहाँ मोटर 27,000 से अधिक क्रांतियों को गति देती है। तुम्हारे साथ था इगोरान.
लेख पर चर्चा करें कि डीवीडी या एचडीडी से मोटर कैसे कनेक्ट करें