Jakoś dawno temu natknąłem się na obwód sterownika silnik krokowy na chipie LB11880, ale ponieważ nie miałem takiego chipa, a wokół leżało kilka silników, odłożyłem ciekawy projekt z uruchomieniem silnika na tylnym palniku. Czas minął, a teraz nie ma już problemów z opracowaniem Chin ze szczegółami, więc zamówiłem MS i postanowiłem zmontować i przetestować połączenie szybkich silników z HDD. Schemat sterownika jest traktowany jako standard:
Obwód sterownika silnika
Poniżej znajduje się skrócony opis artykułu, przeczytaj cały. Silnik, który obraca wrzeciono dysku twardego (lub CD/DVD-ROM) to konwencjonalny trójfazowy synchroniczny silnik prądu stałego. Przemysł produkuje gotowe jednoukładowe sterowniki sterujące, które ponadto nie wymagają czujników położenia wirnika, ponieważ takie czujniki pełnią uzwojenia silnika. Układy sterujące do trójfazowych silników prądu stałego, które nie wymagają dodatkowych czujników, to TDA5140; TDA5141; TDA5142; TDA5144; TDA5145 i oczywiście LB11880.

Silnik podłączony zgodnie ze wskazanymi schematami przyspieszy, aż do osiągnięcia limitu częstotliwości generowania VCO mikroukładu, który jest określony przez wartości kondensatora podłączonego do styku 27 (im mniejsza jego pojemność, tym wyższa częstotliwość ) lub silnik jest zniszczony mechanicznie. Nie zmniejszaj zbytnio pojemności kondensatora podłączonego do zacisku 27, ponieważ może to utrudnić uruchomienie silnika. Prędkość obrotową reguluje się, zmieniając odpowiednio napięcie na styku 2 mikroukładu: Vpit - maksymalna prędkość; 0 - silnik jest zatrzymany. Jest też sygnet od autora, ale swoją wersję rozpowszechniam jako bardziej zwartą.

Później pojawiły się zamówione przeze mnie mikroukłady LB11880, wlutowałem je w dwa gotowe szaliki i przetestowałem jeden z nich. Wszystko działa dobrze: prędkość regulowana jest zmienną, trudno określić prędkość, ale myślę, że na pewno jest ich do 10 000, bo silnik przyzwoicie buczy.

Ogólnie rzecz biorąc, początek został zrobiony, zastanowię się, gdzie złożyć wniosek. Pojawia się pomysł, aby była taka sama jak ściernica autora. A teraz przetestowałem go na kawałku plastiku, zrobiłem jak wentylator, dmucha po prostu brutalnie, mimo że na zdjęciu nawet nie widać, jak się kręci.

Możesz zwiększyć prędkość powyżej 20 000, przełączając pojemności kondensatora C10 i dostarczając zasilanie do MS do 18 V (limit 18,5 V). Przy tym napięciu mój silnik gwizdnął dokładnie! Oto wideo z zasilaczem 12 V:
Wideo połączenia silnika HDD
Podłączyłem też silnik z CD, jeździłem nim z zasilaczem 18 V, bo u mnie są kulki, rozpędza tak, że wszystko skacze! Szkoda nie śledzić prędkości, ale sądząc po dźwięku, jest bardzo duży, aż do cienkiego gwizdka. Gdzie zastosować takie prędkości, oto jest pytanie? Przychodzi mi do głowy mini szlifierka, wiertarka stołowa, szlifierka... Zastosowań jest wiele - pomyśl sam. Zbieraj, testuj, dziel się wrażeniami. W Internecie jest wiele ciekawych recenzji wykorzystujących te silniki prowizoryczne projekty. Widziałem filmik w internecie, tam Kulibiny z tymi silnikami robią pompy, super wentylatory, temperówki, można się domyślić gdzie zastosować takie prędkości, tu silnik rozpędza się ponad 27 000 obrotów. był z tobą Igoran.
Omów artykuł JAK PODŁĄCZYĆ SILNIK Z DVD LUB HDD
. Temat z pewnością ciekawy, zwłaszcza dla początkujących radiowych „dręczycieli”, ale moim zdaniem daleki od pełnego ujawnienia. Nielogiczny wniosek, a mianowicie jakiego schematu używał szanowany TwIsTeRza moją decyzję, czy zaproponowany (przez koleżankę z pracy dziennikarskiej)S anyaav na M/S TDA5145, MK czy coś innego. W tym artykule chcę wypełnić pewne luki na forum i opowiedzieć, moim zdaniem, o starym mikroukładzie, który jest całkiem godny nawet według współczesnych standardówFUNT11880. A więc zacznijmy i zacznijmy od ogólnych informacji, czym jest silnik z HDD, CD-ROM, DVD-ROMSilnik wrzeciona dysku twardego (lub CD/DVD-ROM) to synchroniczny trójfazowy silnik prądu stałego.
Taki silnik można rozkręcić podłączając go do trzech kaskad półmostkowych, którymi steruje generator trójfazowy, którego częstotliwość po włączeniu jest bardzo niska, a następnie płynnie wzrasta do wartości nominalnej. Nie jest najlepszym rozwiązaniem zadanie, taki obwód nie ma sprzężenia zwrotnego, a zatem częstotliwość generatora wzrośnie w nadziei, że silnik zdąży nabrać rozpędu, nawet jeśli w rzeczywistości jego wał jest nieruchomy. Tworzenie schematu za pomocą opinia wymagałoby zastosowania czujników położenia wirnika i kilku pakietów układów scalonych, nie licząc tranzystorów wyjściowych. Płyty CD/DVD-ROM zawierają już czujniki Halla, za pomocą których sygnałów można określić położenie wirnika silnika, ale czasami dokładna pozycja wcale nie jest ważna i nie chcesz marnować „dodatkowych przewodów”.
Na szczęście przemysł produkuje gotowe, jednoukładowe sterowniki sterujące, które ponadto nie wymagają czujników położenia wirnika, takie czujniki pełnią uzwojenia silnika.Obwody sterowania do silników trójfazowych prądu stałego, które nie wymagają dodatkowych czujników (czujnikami są same uzwojenia silnika):TDA 5140; TDA 5141; TDA 5142; TDA 5144; TDA 5145 i oczywiście FUNT 11880. (Jest kilka innych, ale na inny czas.)
Schemat ideowy podłączenia silnika do układu LB11880.
Początkowo ten mikroukład jest przeznaczony do sterowania silnikiem magnetowidów BVG, w kluczowych etapach ma tranzystory bipolarne, a nie tranzystory MOSFET.W swoich projektach użyłem tego konkretnego mikroukładu, po pierwsze był dostępny w najbliższym sklepie, a po drugie jego koszt był niższy (choć niewiele) niż inne mikroukłady z powyższej listy.
Właściwie obwód przełączania silnika:

Jeśli twój silnik nagle ma nie 3, ale 4 wyjścia, to powinieneś podłączyć go zgodnie ze schematem:

I jeszcze jeden bardziej wizualny schemat, przystosowany do użytku w samochodzie.
Trochę Dodatkowe informacje o LB11880 i nie tylko
Silnik podłączony zgodnie ze wskazanymi schematami przyspieszy, aż do osiągnięcia limitu częstotliwości generowania VCO mikroukładu, który jest określony przez wartości kondensatora podłączonego do styku 27 (im mniejsza jego pojemność, tym wyższa częstotliwość ) lub silnik jest zniszczony mechanicznie.Nie zmniejszaj zbytnio pojemności kondensatora podłączonego do zacisku 27, ponieważ może to utrudnić uruchomienie silnika.
Jak wyregulować prędkość obrotową?
Prędkość obrotową reguluje się, zmieniając odpowiednio napięcie na styku 2 mikroukładu: Vpit - maksymalna prędkość; 0 - silnik jest zatrzymany.
Należy jednak zauważyć, że płynna regulacja częstotliwości nie będzie możliwa po prostu przez zastosowanie rezystora zmiennego, ponieważ regulacja nie jest liniowa i odbywa się w mniejszych granicach niż Vpit - 0, dlatego najlepsza opcja będzie podłączenie do tego wyjścia kondensatora do którego przez rezystor np. podawany jest sygnał PWM z mikrokontrolera lub regulatora PWM na znanym na całym świecie zegarzeNE555 (w Internecie jest mnóstwo takich schematów)
Aby określić aktualną prędkość, użyj pinu 8 mikroukładu, na którym podczas obracania się wału silnika pojawiają się impulsy, 3 impulsy na 1 obrót wału.
Jak ustawić maksymalny prąd w uzwojeniach?
Wiadomo, że silniki trójfazowe prądu stałego pobierają znaczne ilości prądu poza trybami pracy (gdy ich uzwojenia są zasilane impulsami o niskiej częstotliwości).Rezystor R1 służy do ustawienia maksymalnego prądu w tym obwodzie.Gdy tylko spadek napięcia na R1, a tym samym na styku 20, przekroczy 0,95 V, sterownik wyjściowy mikroukładu przerywa impuls.Wybierając wartość R1, należy pamiętać, że dla tego mikroukładu maksymalny prąd nie przekracza 1,2 ampera, nominalny wynosi 0,4 ampera.
Parametry układu LB11880
Napięcie zasilania stopnia wyjściowego (pin 21): 8 ... 13 woltów (maksymalnie 14,5);
Napięcie zasilania rdzenia (pin 3): 4 ... 6 V (maksymalnie 7);
Maksymalne rozpraszanie mocy chipa: 2,8 W;
Zakres temperatur pracy: -20...+75 stopni.

Oto ten dysk (choć gdy nie było na nim jeszcze miedzianych śrub), pozornie mały i skarłowaciały silnik ze starego dysku twardego 40 GB, zaprojektowany na 7200 obr/min (RPM) zdołał rozpędzić się do około 15000…17000 obr/min , jeśli nie ograniczaj jego prędkości. Myślę więc, że zakres silników z przeciążonych dysków twardych jest bardzo obszerny. Oczywiście nie możesz zrobić szlifierki / wiertarki / szlifierki, nawet o tym nie myśl, ale bez dużego obciążenia silniki są w stanie wiele.
F
archiwum plików dla samodzielny montaż Pobieranie
POWODZENIA!!
Taki silnik można rozkręcić podłączając go do trzech stopni półmostkowych, którymi steruje prądnica trójfazowa, której częstotliwość po włączeniu jest bardzo niska, a następnie płynnie wzrasta do wartości nominalnej. Nie jest to najlepsze rozwiązanie problemu, taki obwód nie ma sprzężenia zwrotnego i dlatego częstotliwość generatora wzrośnie w nadziei, że silnik zdąży nabrać rozpędu, nawet jeśli w rzeczywistości jego wał jest nieruchomy. Stworzenie obwodu sprzężenia zwrotnego wymagałoby użycia czujników położenia wirnika i kilku pakietów układów scalonych, nie licząc tranzystorów wyjściowych. Płyty CD/DVD-ROM zawierają już czujniki Halla, za pomocą których sygnałów można określić położenie wirnika silnika, ale czasami dokładna pozycja wcale nie jest ważna i nie chcesz marnować „dodatkowych przewodów”.
Na szczęście przemysł produkuje gotowe, jednoukładowe sterowniki sterujące, które ponadto nie wymagają czujników położenia wirnika, takie czujniki pełnią uzwojenia silnika.
Obwody sterowania do silników trójfazowych prądu stałego, które nie wymagają dodatkowych czujników (czujnikami są same uzwojenia silnika):
LB11880; TDA5140; TDA5141; TDA5142; TDA5144; TDA5145.
Jest kilka innych, ale z jakiegoś powodu nie ma ich w sprzedaży tam, gdzie szukałem, a na zamówienie nie lubię czekać od 2 do 30 tygodni.
Schemat ideowy podłączenia silnika do układu LB11880
Początkowo ten mikroukład jest przeznaczony do sterowania silnikiem magnetowidów BVG, więc jest stary, w kluczowych etapach ma tranzystory bipolarne, a nie tranzystory MOSFET.W moich projektach użyłem tego konkretnego mikroukładu, po pierwsze był dostępny w najbliższym sklepie, a po drugie jego koszt był niższy niż w przypadku innych mikroukładów z powyższej listy.
Właściwie obwód przełączania silnika:

Jeżeli twój silnik ma nie 3, ale 4 wyjścia, to powinien być podłączony zgodnie ze schematem:

Kilka dodatkowych informacji o LB11880 i nie tylko
Silnik podłączony zgodnie ze wskazanymi schematami przyspieszy, aż do osiągnięcia limitu częstotliwości generowania VCO mikroukładu, który jest określony przez wartości kondensatora podłączonego do styku 27 (im mniejsza jego pojemność, tym wyższa częstotliwość ) lub silnik jest zniszczony mechanicznie.Nie zmniejszaj zbytnio pojemności kondensatora podłączonego do zacisku 27, ponieważ może to utrudnić uruchomienie silnika.
Jak wyregulować prędkość obrotową?
Prędkość obrotową reguluje się, zmieniając odpowiednio napięcie na styku 2 mikroukładu: Vpit - maksymalna prędkość; 0 - silnik jest zatrzymany.
Należy jednak zauważyć, że płynna regulacja częstotliwości nie będzie możliwa po prostu przez zastosowanie rezystora zmiennego, ponieważ regulacja nie jest liniowa i odbywa się w mniejszych granicach niż Vpit - 0, więc najlepszym rozwiązaniem byłoby podłączenie kondensatora do tego wyjścia do którego poprzez rezystor np. z mikrokontrolera dochodzi sygnał PWM.
Aby określić aktualną prędkość, użyj pinu 8 mikroukładu, na którym podczas obracania się wału silnika pojawiają się impulsy, 3 impulsy na 1 obrót wału.
Jak ustawić maksymalny prąd w uzwojeniach?
Wiadomo, że silniki trójfazowe prądu stałego pobierają znaczne ilości prądu poza trybami pracy (gdy ich uzwojenia są zasilane impulsami o niskiej częstotliwości).
Rezystor R1 służy do ustawienia maksymalnego prądu w tym obwodzie.
Gdy tylko spadek napięcia na R1, a tym samym na styku 20, przekroczy 0,95 V, sterownik wyjściowy mikroukładu przerywa impuls.
Wybierając wartość R1, należy pamiętać, że dla tego mikroukładu maksymalny prąd nie przekracza 1,2 ampera, nominalny wynosi 0,4 ampera.
Parametry układu LB11880
Napięcie zasilania stopnia wyjściowego (pin 21): 8 ... 13 woltów (maksymalnie 14,5);
Napięcie zasilania rdzenia (pin 3): 4 ... 6 V (maksymalnie 7);
Maksymalne rozpraszanie mocy chipa: 2,8 W;
Zakres temperatur pracy: -20...+75 stopni.
Ale tak naprawdę, do czego użyłem silnika z dysku twardego w połączeniu z określonym mikroukładem: 
Ten dysk (choć jeszcze nie było na nim miedzianych śrub), pozornie mały i skarłowaciały silnik ze starego dysku twardego Seagate Barracuda, 40 GB, zaprojektowany na 7200 obr./min (RPM) zdołał przetaktować do 15000 ... 17000 obr. Nie ograniczałem jego prędkości. Myślę więc, że zakres silników z przeciążonych dysków twardych jest bardzo obszerny. Oczywiście nie da się zrobić szlifierki / wiertarki / szlifierki, nawet o tym nie myśl, ale bez dużego obciążenia silniki są w stanie dużo, np. jeśli użyjesz ich do obracania bębna z lusterkami, do mechanicznego skanowania wiązki laserowej itp.
Podczas używania starych dysków HDD do celów aplikacyjnych, czasami pojawia się problem polegający na tym, że silnik wrzeciona zatrzymuje się po pewnym czasie po uruchomieniu. Mają taką „sztuczkę” - jeśli nie są odbierane żadne sygnały z jednostki głównej do mikroukładu sterownika, uniemożliwia to mikroukładowi sterownika obracanie silnika. Na przykładzie kilku modeli dysków spróbujmy dowiedzieć się, jak to naprawić.
Wszystko zaczęło się od tego, że przywieźli kilka starych dysków twardych ( rys.1) i powiedział, że tutaj robotnicy mieszają się z "zabitymi", jeśli chcesz - wybierz, jeśli nie chcesz - rób co chcesz. Ale jeśli wymyślisz, jak używać ich jako małego narzędzia szmerglowego, powiedz mi. Cóż, tutaj mówię...
Pierwszy dysk twardy - Rodzina "Quantum" "Fireball TM" z układem napędowym TDA5147AK ( rys.2). Zobaczmy, kim on jest.

Górną pokrywę mocuje się 4 śrubami w rogach i jedną śrubą i nakrętką u góry, pod naklejkami. Po zdjęciu osłony widać sam dysk twardy, głowice czytające oraz system kontroli położenia głowicy magnetycznej ( rys.3). Odłączamy kabel, odkręcamy system magnetyczny (tu potrzebny jest specjalnie naostrzony klucz imbusowy „gwiazdka”). W razie potrzeby dysk można również zdjąć, odkręcając trzy śruby na wrzecionie silnika (potrzebny jest również sześciokąt).

Teraz zakładamy pokrywę na miejsce, dzięki czemu możemy odwrócić dysk twardy do eksperymentów z elektroniką i podać napięcia +5V i +12V na złącze zasilania. Silnik przyspiesza, pracuje przez około 30 sekund, po czym zatrzymuje się (na płytce drukowanej znajduje się zielona dioda LED - świeci, gdy silnik się obraca, a miga, gdy się zatrzymuje).
Arkusz danych dla układu TDA5147K można łatwo znaleźć w sieci, ale nie było możliwe ustalenie sygnału zezwolenia / zakazu obrotu za jego pomocą. Podczas „podciągania” sygnałów POR do szyn zasilających nie było możliwe osiągnięcie pożądanej reakcji, ale podczas oglądania sygnałów za pomocą oscyloskopu okazało się, że gdy sonda dotknie 7. wyjścia mikroukładu TDA5147AK, resetuje się i ponownie uruchamia silnik. Tak więc po złożeniu najprostszego generatora krótkich impulsów ( rys.4, zdjęcie na dole) z okresem kilku sekund (lub kilkudziesięciu sekund), można sprawić, że silnik będzie się obracał mniej więcej w sposób ciągły. Występujące przerwy w zasilaniu trwają około 0,5 sekundy i nie jest to krytyczne, jeśli silnik jest używany z małym obciążeniem wału, ale w innych przypadkach może być niedopuszczalne. Dlatego, chociaż metoda jest skuteczna, nie jest do końca poprawna. I nie dało się go „poprawnie” uruchomić.

Następny dysk twardy - Rodzina "Quantum" "Trailblazer" (rys.5).

Po podaniu napięcia zasilającego napęd nie wykazuje żadnych oznak życia, a mikroukład 14-107540-03 zaczyna bardzo się nagrzewać na płytce elektroniki. W środku obudowy mikroukładu zauważalne jest wybrzuszenie ( rys.6), co wskazuje na jego widoczną niesprawność. To krępujące, ale nie przerażające.

Patrzymy na układ kontroli obrotów silnika ( rys.7) - HA13555. Nie nagrzewa się pod wpływem zasilania i nie ma na nim widocznych uszkodzeń. Wybieranie przez testera elementów „opasujących” nie ujawniło niczego specjalnego - pozostaje tylko zająć się schematem „włączania”.

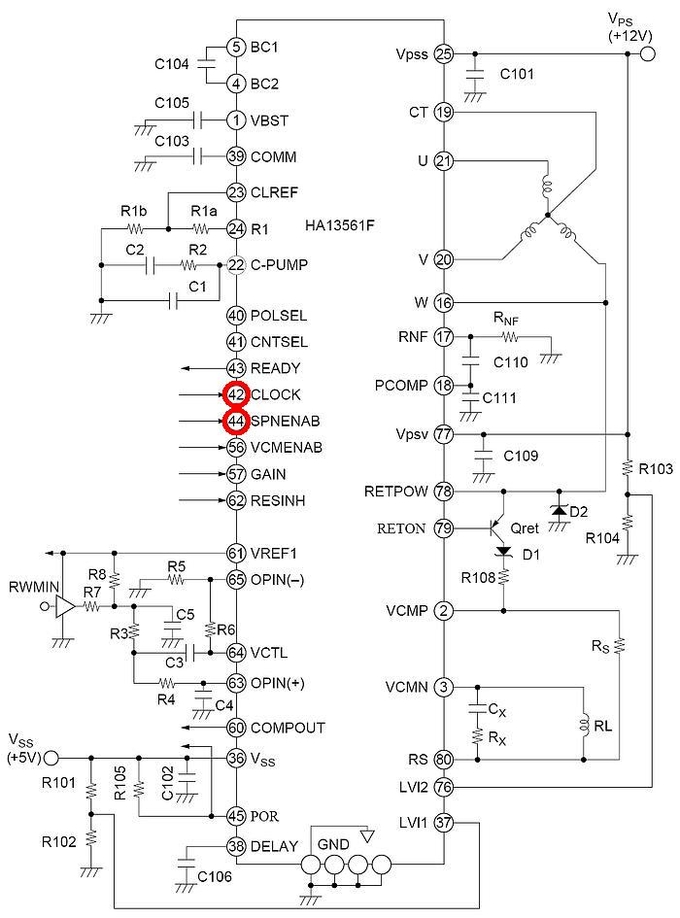
Wyszukiwarki nie znajdują dla niego karty katalogowej, ale jest opis dla HA13561F. Wykonany jest w tej samej obudowie, pasuje na nóżkach zasilających i na wyprowadzeniach „wyjściowych” z HA13555 (ten ostatni ma diody przylutowane do przewodów zasilających silnika - ochrona przed EMF). Spróbujmy określić niezbędne wyjścia sterujące. Z arkusza danych na HA13561F ( rys.8) wynika z tego, że pin 42 (CLOCK) musi być sterowany z częstotliwością zegara 5 MHz z poziomem logicznym TTL i że sygnał pozwalający na uruchomienie silnika ma wysoki poziom na pin 44 (SPNENAB).
Ponieważ mikroukład 14-107540-03 nie działa, odcięliśmy od niego zasilanie +5 V i od wszystkich innych mikroukładów, z wyjątkiem HA13555 ( rys.9). Za pomocą testera sprawdzamy poprawność „nacięć” brakiem połączeń.
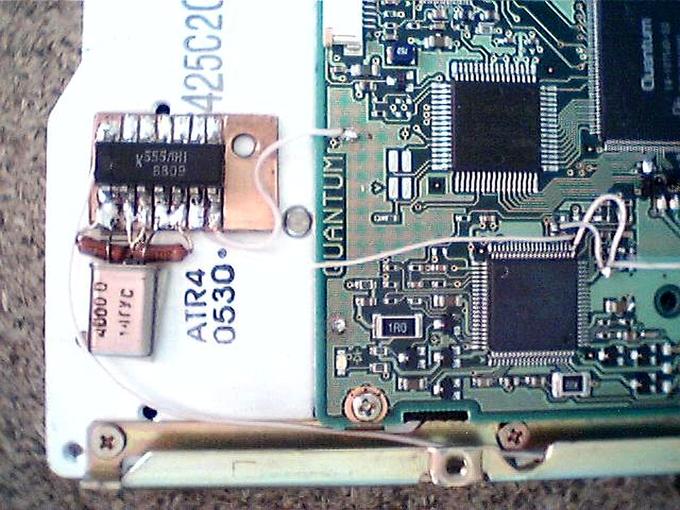
Na dolnym zdjęciu rysunek 9 czerwone kropki pokazują punkty lutowania dla napięcia +5 V dla HA13555 i rezystora „podciągania do plusa” jego 44 pinów. Jeśli rezystor z pinu 45 zostanie usunięty ze swojego miejsca (jest to R105 zgodnie z Cyfra 8) i postawić pionowo z pewnym nachyleniem do mikroukładu, wtedy dodatkowy rezystor do podciągania do „plusa” pinu 44 można przylutować do przelotki i do wiszącego pinu pierwszego rezystora ( rys.10), a następnie do miejsca ich podłączenia można doprowadzić napięcie +5 V.

Na Odwrotna strona deski należy ciąć z prowadnicami, jak pokazano na rysunek 11. Są to „dawne” sygnały pochodzące z spalonego mikroukładu 14-107540-03 i starego rezystora „podciągającego” R105.

Możesz zorganizować dostarczanie „nowych” sygnałów zegarowych na pin 42 (ZEGAR) za pomocą dodatkowego zewnętrznego generatora zamontowanego na dowolnym odpowiednim mikroukładzie. W tym przypadku użyto K555LN1, a wynikowy obwód pokazano na rysunek 12.

Po „zrolowaniu” napięcia +5 V zasil przewodem MGTF bezpośrednio ze złącza do pinu 36 (Vss) i innych wymaganych połączeń ( rys.13), napęd uruchamia się i pracuje non stop. Oczywiście, gdyby mikroukład 14-107540-03 był w dobrym stanie, całe udoskonalenie polegałoby tylko na „zwężeniu” 44. wyjścia do szyny +5 V.
Na tej „śrubce” testowano jego działanie przy innych częstotliwościach zegara. Sygnał dostarczany był z zewnętrznego generatora fali prostokątnej, a minimalna częstotliwość, z jaką napęd pracował stabilnie, wynosiła 2,4 MHz. Przy niższych częstotliwościach przyspieszenie i zatrzymanie występowały cyklicznie. Maksymalna częstotliwość to około 7,6 MHz, przy jej dalszym wzroście liczba obrotów pozostała taka sama.
Liczba obrotów zależy również od poziomu napięcia na pinie 41 (CNTSEL). W arkuszu danych znajduje się tabela dla chipa HA13561F i odpowiada ona wartościom uzyskanym z HA13555. W wyniku wszystkich manipulacji udało się uzyskać minimalną prędkość obrotową silnika około 1800 obr/min, maksymalnie 6864 obr/min. Sterowanie odbywało się za pomocą programu, transoptora ze wzmacniaczem i kawałka taśmy elektrycznej przyklejonej do dysku tak, aby podczas obracania się dysku nachodziła na okno transoptora (częstotliwość powtarzania impulsów była określana w oknie analizatora widma, a następnie mnożona). o 60).
Trzeci dysk - SAMSUNG WN310820A.
Po włączeniu zasilania chip sterownika - HA13561 zaczyna się bardzo nagrzewać, silnik nie obraca się. Na obudowie mikroukładu zauważalne jest wybrzuszenie ( rys.14), podobnie jak w poprzednim przypadku. Nie da się przeprowadzić żadnych eksperymentów, ale można spróbować zasilić silnik z płytki za pomocą układu HA13555. Do kabla silnika i do styków wyjściowych złącza płytki elektroniki przylutowano długie, cienkie przewodniki - wszystko zaczęło się i działało bezproblemowo. Gdyby HA13561 były nienaruszone, modyfikacja rozruchowa byłaby taka sama jak w przypadku „Quantum Trailblazer” (pin 44 do szyny +5V).

Czwarty napęd - Rodzina "Quantum" "Fireball SE" z układem napędowym AN8426FBP ( rys.15).

Jeśli wyłączysz kabel bloku głowicy i podłączysz zasilanie do dysku twardego, silnik przyspiesza i oczywiście po chwili się zatrzymuje. W sieci znajduje się arkusz danych dla układu AN8426FBP i można go użyć, aby dowiedzieć się, który pin 44 (SIPWM) jest odpowiedzialny za uruchomienie ( rys.16). A jeśli teraz przetniemy ścieżkę pochodzącą z mikroukładu 14-108417-02 i „podciągnij” pin 44 przez rezystor 4,7 kΩ do szyny +5 V, to silnik się nie zatrzyma.

I wreszcie, cofając się trochę, przebiegi zostały pobrane na pinach W i V układu HA13555 w stosunku do wspólnego przewodu ( Ryż. 17).

Najprostsza aplikacja stary dysk twardy- mały szmergiel do obciągania wierteł, noży, śrubokrętów ( rys.18). Aby to zrobić, po prostu przyklej papier ścierny na dysku magnetycznym. Jeśli „śruba” była z kilkoma „naleśnikami”, możesz wykonać wymienne dyski o różnych rozmiarach ziarna. I tutaj fajnie by było móc przestawić prędkość obrotową silnika wrzeciona, gdyż przy dużej ilości obrotów bardzo łatwo jest przegrzać ostrzoną powierzchnię.

Oczywiście Emery to nie jedyne zastosowanie starego dysku twardego. Projekty odkurzaczy, a nawet ekspres do waty cukrowej można łatwo znaleźć w sieci ...
Oprócz tekstu znajdują się wspomniane karty katalogowe i pliki płytek obwodów drukowanych zewnętrznych generatorów impulsów w formacie programu w wersji 5 (widok od strony druku, mikroukłady instalowane są jako smd, czyli bez wiercenia otworów).
Andrey Goltsov, r9o-11, Iskitim, kwiecień 2018 r.
Lista elementów radiowych
| Przeznaczenie | Rodzaj | Określenie | Ilość | Notatka | Sklep | Mój notatnik | |
|---|---|---|---|---|---|---|---|
| Do rysunku nr 4 | |||||||
| DD1 | Żeton | K561LN2 | 1 | Do notatnika | |||
| R1, R2 | Rezystor | 470 kΩ | 2 | smd 0805 | Do notatnika | ||
| R4 | Rezystor | 10 kΩ | 1 | smd 0805 | |||
Przez długi czas miałem tak mały silnik, że wyrwałem się z jakiegoś dysku twardego. Nawiasem mówiąc, dysk został przed nim również zachowany! Jeśli to połączę, spieprzę to w następnym kroku. W międzyczasie postanowiłem po prostu spróbować go ożywić. Ten silnik jest ciekawy pod tym względem, że teoretycznie (jak zrozumiałem - osoba, która do tej pory nic nie wiedziała o silnikach) jest to zawór. I jak mówi nam Wikipedia: „silniki zaworów są zaprojektowane do łączenia najlepsze cechy Silniki prądu przemiennego i prądu stałego. „A ze względu na brak przesuwnych styków elektrycznych (ponieważ zespół szczotek został tam zastąpiony bezstykowym przełącznikiem półprzewodnikowym), takie silniki mają wysoką niezawodność i długą żywotność. Ponadto nie wymienię wszystkich inne zalety tych silników i tematy do powtórzenia Wikipedii, ale powiem tylko, że zastosowanie takich gadżetów jest dość szerokie, w tym w robotyce, dlatego chciałem dowiedzieć się więcej o zasadach ich pracy.
Zasada działania silnika HDD.
Silnik ma trzy uzwojenia połączone w gwiazdę. Punkt wspólny uzwojeń wyświetlany jest jako plus. +5V jest idealne do pracy. Silnik sterowany jest sygnałem PWM, który należy przyłożyć do jego uzwojeń z przesunięciem fazowym 120 °. Jednak nie jest możliwe natychmiastowe przyłożenie pożądanej częstotliwości do silnika, należy go najpierw przyspieszyć. Najprostszy sposób połącz trzy uzwojenia przez tranzystory, podając im sygnał PWM do bazy z mikrokontrolera. Od razu zrobię rezerwację dotyczącą tranzystorów: lepiej wziąć urządzenia polowe, ponieważ prąd przez nie wydaje się przyzwoity, a bipolarne bardzo się nagrzewają. Najpierw wziąłem 2N2222a. Rozgrzały się w kilka sekund, chwilowo rozwiązały problem instalując w pobliżu chłodnicę, ale potem uznały, że potrzebne jest coś bardziej niezawodnego, czyli więcej ☺ W rezultacie zainstalowaliśmy nasz KT817G. Trzeciego nie było, zamiast tego mam KT815G. W tym obwodzie można je wymienić, ale KT815 są przeznaczone do stałego prądu kolektora 1,5 ampera, a KT817 - 3A. Zaznaczam, że ogólnie 2N2222a - do 0,8A. Litera KT81… również nie odgrywa żadnej roli, ponieważ mamy tylko 5 woltów. Teoretycznie częstotliwość zmiany sygnału nie jest większa niż 1 milisekunda, w rzeczywistości jest jeszcze wolniejsza, więc wysoka częstotliwość tranzystorów również nie odgrywa żadnej roli. Generalnie podejrzewam, że w tym układzie można poeksperymentować z niemal dowolnymi tranzystorami typ n-p-n, o prądzie kolektora co najmniej 1 amper.
Załączam obwód, rezystory też zostały dobrane eksperymentalnie, na 1 kiloom - działają całkiem dobrze. Włożyłem kolejne 4,7k - to dużo, silnik się gaśnie.
Silnik posiada 4 wyjścia. Najpierw dowiadujemy się, który z nich jest powszechny. Aby to zrobić, zmierz rezystancję między wszystkimi zaciskami za pomocą multimetru. Opór między końcami uzwojeń jest dwukrotnie większy niż między końcem jednego uzwojenia a wspólnym punktem środkowym. Konwencjonalnie 4 omy przeciwko 2. Które uzwojenie podłączyć gdzie - to nie ma znaczenia, nadal jeżdżą jedno po drugim.
Tekst programu:
// Program do uruchamiania silnika dysku twardegopusta konfiguracja()
#define P 9100 // Początkowe opóźnienie przyspieszenia silnika
#define x 9 // Numer pinu do uzwojenia x
#define y 10 // Numer pinu do uzwojenia y
#define z 11 // Numer pinu do uzwojenia z
niepodpisany int p; // Zmienna opóźnienia dla podkręcania
długi time_pass; // Zegar
bajt i = 0; // Licznik cyklu sterowania fazami silnika
{
p = P;// Przypisz początkową wartość opóźnienia do podkręcania//Serial.begin(9600); // Otwórz port COM do debugowania
pinMode(x, WYJŚCIE); // Ustaw piny współpracujące z silnikiem na dane wyjściowe
pinMode(y, WYJŚCIE);
pinMode(z, WYJŚCIE);
digitalWrite(x, LOW); // Ustaw fazę początkową silnika, możesz zacząć od dowolnej z 6 faz
digitalWrite(y, WYSOKA);
digitalWrite(z, LOW);
time_pass = mikro(); // Zresetuj minutnikpusta pętla ()
{Jeśli ja< 7) && (micros () - time_pass >= p)) // Jeśli licznik ma liczbę od 0 do 6 i upłynął limit czasu zmiany fazy
{
time_pass = mikro(); // Zresetuj minutnik
if (i == 0) ( digitalWrite (z, HIGH ); ) // Ustaw 0 lub 1 w zależności od numeru fazy na żądanym pinie
if (i == 2) ( digitalWrite (y, LOW ); )
if (i == 3) ( digitalWrite (x, HIGH ); )
if (i == 4) ( digitalWrite (z, LOW ); )
if (i == 5) ( digitalWrite (y, HIGH ); )
if (i == 6) ( digitalWrite (x, LOW ); )I++; // Plus licznik faz
}
if (i >= 7) // If Counter Overflows
{
i = 0; // Zresetuj licznik
if (p > 1350) (p = p - 50;) // Jeśli silnik nie wszedł w prędkość maksymalna- skrócić czas zmiany fazy
//Serial.println(p); Debugowanie przekroczenia limitu czasu
}
Jaki jest wynik?
W efekcie mamy silnik, który rozpędza się w kilka sekund. Czasami przyspieszenie jest niezrównoważone i silnik zatrzymuje się, ale częściej wszystko działa. Jak się ustabilizować - jeszcze nie wiem. Jeśli ręcznie zatrzymasz silnik, nie uruchomi się on ponownie - musisz ponownie uruchomić program. Do tej pory jest to maksimum, które zostało z niego wyciśnięte. Gdy p spada poniżej 1350, silnik wylatuje z przyspieszenia. 9100 na początku też zostało wybrane eksperymentalnie, można spróbować to zmienić, zobaczyć co się stanie. Prawdopodobnie dla innego silnika numery będą inne - musiałem wybrać dla swojego. Z obciążeniem ( oryginalny dysk) silnik przestaje się uruchamiać, więc zainstalowanie czegoś na nim będzie wymagało ponownej kalibracji oprogramowania. Kręci się stosunkowo szybko, dlatego polecam założyć okulary podczas uruchamiania, zwłaszcza jeśli w tym momencie coś na nim wisi. Mam nadzieję, że będę dalej z tym eksperymentować. Do tego czasu życzę wszystkim powodzenia!